渤小海伴您读研报之芯动联科
(转自:渤海证券财富管理)

1.公司概况
1.1MEMS惯性传感器国内龙头,研发实力卓越
芯动联科主营业务为高性能硅基MEMS(Micro-Electro-Mechanical System)惯性传感器的研发、测试与销售,是目前少数可以实现高性能MEMS陀螺仪稳定量产的企业。产品方面,公司主要产品为高性能MEMS惯性传感器,包括陀螺仪和加速度计;技术方面,公司形成了芯片设计、工艺方案、封装与测试的技术闭环,并实现了高性能MEMS惯性传感器的稳定量产,核心性能具备和海外龙头对标的能力;应用领域方面,涵盖高端工业、无人系统、高可靠等场景。
公司MEMS陀螺仪具有惯性导航等用途

1.2业绩保持高增速,大力研发稳固竞争力
2024前三季度公司实现营业收入2.71亿元,同比增加41.21%;实现归母净利润1.38亿元,同比增加42.39%。公司凭借产品性能领先、自主研发等优势,保持业绩快速增长,获得不同领域客户的认可,并且完善产品的占位布局。2024年以来公司产品经下游用户陆续验证导入,应用领域不断增加,进入试产及量产阶段的项目滚动增多,市场渗透率提升,驱动公司销售收入放量增长。单Q3公司实现营业收入1.34亿元,同比增加40.37%;实现归母净利润0.82亿元,同比增加45.53%。单季度公司营收利润均创历史新高。
公司收入规模、增速变化及公司归母净利润及增速变化

2.MEMS惯性传感器行业概况
2.1随精度提升MEMS正成为主流方向,高端领域国产化加速推进
MEMS传感器通过微传感元件和传输单元,可将输入的信号转换,并导出另一种可监测信号。MEMS传感器相对传统传感器,具有体积小、重量轻、成本低、功耗低、可靠性高、适于批量化生产、易于集成和实现智能化等特点。MEMS惯性传感器属于MEMS传感器的重要分支,主要包括陀螺仪、加速度计等,并可通过组合形成惯性组合传感器IMU。2021年加速度计、陀螺仪、磁力计和IMU四类产品市场规模为35.09亿美元,占MEMS器件份额的25.81%,Yole预计到2025年将达到43.39亿美元。
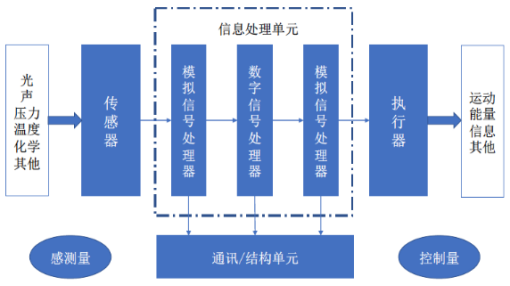
MEMS传感器工作原理
MEMS惯性传感器市场是细分的高性能领域,面向的场景是高端工业、无人系统等。参考Yole Inteligence发布的数据,2023年全球高性能惯性传感器市场规模约37亿美元,其中大部分(48%)来自国防和航空航天应用,MEMS惯性传感器约占24%,主要份额集中在海外龙头Honeywell、ADI、Grumman等手中。预计2024-2028年,高端惯性传感器市场CAGR约15%。2023年国内高性能MEMS陀螺仪(包括IMU中的陀螺仪)市场规模约12.68亿元,其中军用市场占绝大部分。2025年后民用市场逐渐放量。
全球高性能惯性传感器市场规模及中国高性能MEMS陀螺仪市场规模

中低端陀螺仪已基本实现了国产化能力,高端MEMS惯性传感器仍依赖于进口。国外MEMS惯性技术经历20-30年的理论和实践,包括Honeywell、ADI、Sensonor、Silicon Sensing、Colibrys等公司已经实现商业化,占据了全球主要的市场份额。国内从事高性能MEMS惯性传感器研发的主要是央企和科研院所,已经实现产业化的公司主要为芯动联科和美泰科技。我国直到2010年前后产业才形成雏形。尤其是中高端应用场景下,在人才储备、技术积累、产业规模、工艺配套等方面有所滞后,与Honeywell、ADI 等国际巨头相比仍存在较大差距。
2.2自动驾驶、低空经济等产业发展推动景气度进入上行周期
低空飞行器的导航系统的关键指标是精度和可靠性。解决方案有两种,分别是提升传感器自身的精度和可靠性,即采用更高级别的传感器;以及使用组合导航,组合更多的不同工作原理的传感器。前者算法简单,但是成本高昂,因此eVTOL规模化应用更需要依赖于组合导航的使用。IMU是组合导航的核心,结合GNSS、磁罗盘后有望提升系统的容错能力,提升算法精度,提高稳定性。IMU由加速度计和陀螺仪组成,战术级别的MEMS已经具备较好的性能,可以满足eVTOL的基本需求。其特点是受环境干扰少、动态性能好、导航信息全面且输出频率高,但是误差随时间不断累积。融合算法从IMU、GNSS、磁罗盘、大气数据的组合中调整导航系统至最佳性能并保持高可靠性,输出完整的飞行器姿态、航向、三维速度、三维位置信息和对应的精度指标。
TDK开发的高性能MEMS陀螺仪

IMU是实现人形机器人姿态控制的核心,未来1个人形机器人预计需要4个IMU用以控制姿态和稳定机体。IMU是人形机器人保持平衡及运动控制的关键传感器。惯性传感器采集的角速度与加速度等惯性信息可以用于推算人形机器人的实时位置与运动轨迹,同时可以与机器人搭载的多传感器融合,在数据类型和数据频率间实现互补。人形机器人达到特斯拉Optimus的精度,需要通过增加高精度MEMS IMU数量来达到身体稳定、姿态控制以及头不稳定补偿的效果。IMU在机器人上可以与摄像头、力传感器等多传感器数据融合,以达到维持身体平衡,预测速度和轨迹并进行定位导航等功能,在四足机器人、人形机器人上均有望标配。
自动驾驶由感知、决策、执行三大系统组成,传感器作为汽车的“五官”,是“感知”的主要承担者。传统燃油车大多具备针对转速、压力、振动等参数的状态传感器,智能网联汽车则增加了两大类传感器:一类是环境感知传感器,包括超声波、毫米波、激光雷达等距离传感器和摄像头等视觉传感器;另一类是导航定位传感器,主要包括卫星定位传感器和惯性导航传感器。自动驾驶系统需要IMU来弥补GNSS信号不稳定的缺陷。在GNSS信号较弱的路段,IMU依然能够为自动驾驶系统提供车辆的方向、速度、里程、时间等维度的行驶数据。
3.云计算业务概况
3.1技术研发实力卓著,不断增厚护城河
深耕MEMS技术十余载,高性能陀螺仪核心性能指标达到国际先进水平。公司自主研发的高性能MEMS芯片具有独特的驱动和检测结构,能有效地抑制质量块和电容检测结构对加速度的影响。公司设计的MEMS芯片在保证惯性器件高性能的前提下充分考虑了易量产性和环境适应性,能够满足客户不同惯性平台在不同应用场景下的差异化需求。为了充分发挥MEMS芯片的性能,公司自主研发了拥有完整、成熟算法的配套ASIC芯片,可以根据不同客户的需求和产品应用场合,灵活、快速地调整ASIC 模块的各项参数以获得最优的整体性能。公司在封装和测试层面具有深厚的工艺积淀。封装方面,公司利用CLCC封装技术,对封装结构、材料和工艺条件持续改进,可以显著降低封装应力对传感器性能的影响,同时提高抗冲击能力。
公司陀螺仪33系列在核心性能指标上接近海外龙头的王牌产品。HG4930为Honeywell已量产性能最优的硅基MEMS陀螺仪组成的惯性测量单元。CRH03为Silicon Sensing已量产性能最优的硅基MEMS陀螺仪。STIM210为Sensornor已量产性能最优的三轴硅基MEMS陀螺仪组件。陀螺仪33系列产品为公司目前性能较高的一款产品。主要核心指标零偏稳定性优于Honeywell 的HG4930系列陀螺仪、Silicon Sensing的CRH03系列陀螺仪及Sensonor的STIM210陀螺仪。在角度随机游走指标方面,陀螺仪33系列产品指标优于Sensonor的STIM210系列陀螺仪,与Honeywell的HG4930系列陀螺仪和Silicon Sensing的CRH03系列陀螺仪接近。在标度因数精度指标方面,陀螺仪33 系列产品指标优于Silicon Sensing的CRH03系列陀螺仪和Sensonor的STIM210系列陀螺仪。
公司MEMS加速度计产品的核心技术指标

3.2公司采用轻资产营运模式,资产周转率高
公司区别于海外龙头,采用轻资产Fabless的运营模式。公司专注于芯片研发测试和销售,将晶圆制造、芯片封装环节交由专业的晶圆制造厂商和封装厂商完成,在取得芯片成品并完成测试后对外销售。公司ASIC芯片采用标准CMOS制造工艺,而MEMS芯片采用体硅加工工艺,相较于CMOS制造工艺标准化程度较低。公司和晶圆厂、封装厂合作开发MEMS工艺方案,以保证产品的质量和良率,从而提高传感器芯片产品的性价比和市场竞争力。公司深度参与晶圆代工厂的工艺方案开发,通过DRIE技术在体硅上刻蚀出高深宽比的微机械结构,解决了真空度不稳定、寄生电阻离散、圆片翘曲、结构脱落等一系列工艺问题。
公司采用轻资产的运营模式,提高了资产周转率,降低了资本投入和财务风险。无需自建晶圆加工厂,大幅降低了资本投入和时间成本,也降低了大规模固定资产投资带来的财务风险。轻资产的运营模式使公司更专注于MEMS惯性传感器芯片的研发设计及市场推广,建立技术优势。
编发| 邢艳
复审| 张宏魁
审核| 李皓